Mathematic 1 - Calculus 1 - Summary
1. Vector
1.1 Geometric Vectors
Position Vector
- A vector that originates from the origin and points to a location in space.
Joining Vectors
- Geometric relation:
- Component form:
1.2 Algebraic Vectors
Vector Addition
-
2D:
-
3D:
Scalar Multiplication
-
2D:
-
3D:
-
Direction of the vector depends on scalar ( k ):
- If ( k > 0 ), the vector keeps the same direction.
- If ( k < 0 ), the vector points in the opposite direction.
Norm (Magnitude)
-
2D:
-
3D:
💡 Always perform vector operations (e.g., addition, scalar multiplication) before computing the norm.
Unit Vector
- A unit vector has a magnitude of 1. It is obtained by dividing a vector by its norm:
Basis Vectors
- A 3D vector can be expressed using basis vectors:
1.3 Direction Cosines & Angles (3D)
Direction Cosines
-
Direction cosines represent the cosine of the angle between a vector and each coordinate axis:
Direction Angles
- The angles themselves are found using the inverse cosine:
Identity
- The sum of the squares of the direction cosines always equals 1:
2. Lines & Planes
2.1 Equations of Lines
Line Through a Point and Direction Vector
-
A line passing through point with direction vector can be written as:
Line Through Two Points
-
Given points and , the direction vector is:
-
Line equation becomes:
Forms of Line Equation
-
Vector Form:
-
Parametric Form:
-
Symmetric Form:
2.2 Equations of Planes
Plane Through a Point and Normal Vector
-
Given a point and normal vector , the plane equation is:
-
Expanded form:
Plane Through Three Points
-
Given three points , form two vectors and compute:
-
Then use the point-normal form with one of the points.
2.3 Projections
Vector Projection
-
Projection of onto :
Scalar Projection
-
Component of along :
2.4 Shortest Distance
From a Point to a Line
-
Given point , point on the line, and direction vector :
From a Point to a Plane
-
With normal vector and vector :
Given Plane Equation and Any Point
-
Plane:
-
Point:
From Origin to Plane
Between Two Parallel Planes
-
Ensure both planes have the same normal vector.
-
Find the distance difference from the origin:
2.5 Intersection of Two Lines
Step-by-Step
-
Write both lines in parametric form:
-
Solve the resulting system of equations to find values of and .
-
Substitute back into either line to find the intersection point.
✅ The lines intersect only if all equations result in the same point.
3. Complex Numbers
3.1 Introduction and Operations
Complex Number and Its Conjugate
-
A complex number is defined as:
Equality of Complex Numbers
-
For , then:
Complex Number Operations
-
Addition/Subtraction:
-
Multiplication:
-
Division:
Multiply numerator and denominator by the conjugate of the denominator, then simplify into real and imaginary parts.
Properties with Conjugate
-
Addition:
-
Multiplication:
3.2 Geometrical Interpretation – Argand Diagram
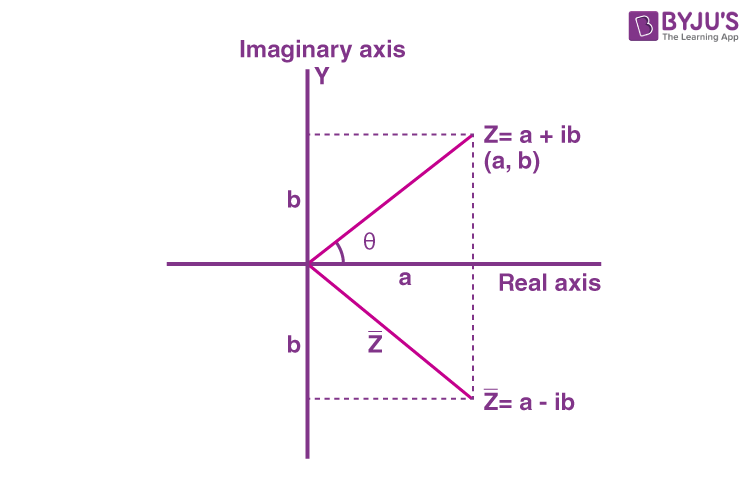
- The x-axis represents the real part.
- The y-axis represents the imaginary part.
3.3 Modulus and Argument
-
The modulus (or absolute value) of a complex number is:
-
The argument is the angle from the positive real axis to the vector:
💡 Tip: For purely imaginary numbers (i.e., ):
- If , then
- If , then
3.4 Cartesian, Polar, and Exponential Forms
-
Euler's Formula:
-
Cartesian Form:
-
Polar Form:
-
Exponential Form:
Where and
3.5 Operations in Polar/Exponential Form
Multiplication
-
Multiply moduli and add arguments:
Division
-
Divide moduli and subtract arguments:
3.6 De Moivre’s Theorem
-
For powers of complex numbers:
-
Using polar form:
🔁 Multiply the argument by and raise the modulus to the power.
Reducing Large Arguments (Radian Mod)
- If the angle becomes too large, subtract as many times as needed:
3.7 Roots of Unity (Not in Exam)
-
The roots of 1 are:
-
Example for :
4. Related Rates, Differentials, and Newton’s Method
4.1 Related Rates & Chain Rule
Related Rates
-
If , the rate of change of with respect to is defined as:
-
is Leibniz's notation for the derivative, and it represents the rate at which changes with .
Chain Rule
-
If and , then:
-
This rule connects rates of change between dependent variables.
Key Ideas for Solving Related Rates Problems
- Use the chain rule to relate changing quantities.
- Establish an equation that relates all variables.
- Differentiate both sides with respect to time.
- Ratios often appear and can simplify or cancel out variables.
4.2 Differentials & Linear Approximation
Differentials
-
Given :
-
Differentials are used to estimate small changes in based on small changes in .
-
Used for approximation:
Where approximates .
Linear Approximation
-
The linear approximation formula at is:
-
This estimates using a tangent line near .
4.3 Newton’s Method
-
An iterative method for approximating roots of a function.
-
Formula:
-
Process:
- Start with an initial guess
- Use the formula to compute better approximations
- Repeat until convergence
-
Works well when:
- is differentiable near the root
- is not zero near the root
5. Inverse & Transcendental Functions
5.1 Inverse Functions
Definition
-
A function has an inverse if it is one-to-one.
-
The graph of is the reflection of about the line .
-
Point relationship:
Inverse Function Theorem
-
If , then:
5.2 Exponential Functions
Laws of Exponents
Derivative
Integral
5.3 Logarithmic Functions
Laws of Logarithms
⚠️ Note:
Derivative
Integral
5.4 Inverse Trigonometric Functions
Inverse Sine
Inverse Cosine
Inverse Tangent
Solving Using Triangle
- Use a triangle to define angle relationships.
- Use geometry to rewrite expressions in simpler terms.
5.5 Hyperbolic Functions
Definition of Hyperbolic Functions
💡
Think of as a variable — so you can still use even if it’s not explicitly written as
Hyperbolic Identities
Derivatives of Hyperbolic Functions
Integrals of Hyperbolic Functions
Inverse Hyperbolic Functions
Derivatives of Inverse Hyperbolic Functions
6. Techniques of Integration
6.1 Integration by Substitution
-
Observe the function and choose an expression to substitute as
- The chosen part should be easily differentiable and cancel with the remaining part of the integrand.
-
When , we differentiate:
-
Replace and the corresponding expression in the integrand with and .
-
For definite integrals, convert limits of into limits in terms of :
6.2 Integration by Parts
-
Formula:
-
Use the LIATE Rule to decide which part of the integrand should be :
- : Logarithmic functions ()
- : Inverse trigonometric functions (, , ...)
- : Algebraic functions (, , )
- : Trigonometric functions (, , ...)
- : Exponential functions ()
⚠️ The LIATE rule is a guideline, not a strict rule — exceptions may apply depending on the problem.
Integration by Parts for Inverse Trig Functions
-
When integrating an inverse trigonometric function (like ), use the trick:
-
Then apply integration by parts with:
6.3 Integration by Partial Fractions
- Use algebra to decompose a rational function into simpler fractions that are easier to integrate.
Case 1: Two linear factors
-
For an expression like:
Case 2: Repeated linear factors
-
For a repeated linear factor like :
-
For , general form:
Case 3: Linear and Irreducible Quadratic
-
If the denominator has both a linear factor and a non-factorizable quadratic :
-
After decomposition, integrate each term using basic rules or known formulas.
7. Definite Integrals & Numerical Integration
7.1 The Definite Integral
-
A definite integral is evaluated over a specific interval:
Substitution with Limits
-
When using substitution in definite integrals:
-
Convert limits:
Integration by Parts with Limits
-
Formula with limits applied:
7.2 The Trapezoidal Rule
-
Approximate the area under a curve by dividing it into trapezoids:
-
Step size (height of each trapezoid):
-
Nodes:
-
Make a table of and corresponding values to compute.
7.3 Simpson’s Rule
-
More accurate than the trapezoidal rule, uses parabolas:
-
Equivalent in simple terms:
-
Step size:
-
Make a table of and values to compute.
7.4 Trapezoidal vs Simpson’s Rule
- Trapezoidal Rule approximates area using straight lines (trapezoids).
- Simpson’s Rule approximates area using quadratic curves (parabolas).
- Simpson’s Rule is usually more accurate if is smooth and is even.
8. First-Order Linear Differential Equations
8.1 Introduction to Differential Equations
- A differential equation is an equation involving a function and its derivatives.
Order of a Differential Equation
-
Determined by the highest derivative in the equation:
Degree of a Differential Equation
-
The degree is the exponent of the highest order derivative (if the equation is polynomial in derivatives):
Linear vs Nonlinear Differential Equations
- A differential equation is linear if:
- All terms and derivatives are of degree 1
- Derivatives of are not multiplied by each other
8.2 Standard Form
-
A first-order linear differential equation is written as:
-
If , the equation is homogeneous.
-
If , the equation is non-homogeneous.
8.3 The Method of Separation of Variables
General Method
-
Rearrange to separate and :
-
Integrate both sides:
-
General solution:
-
If initial values are given, substitute to find for the particular solution.
Applications
Population Growth and Decay
-
General model:
Newton’s Law of Cooling
-
Temperature model:
8.4 Integrating Factors
General Form
-
Arrange into standard linear form:
Step 1: Find Integrating Factor
-
The integrating factor is:
-
Derivative of :
Step 2: Multiply Equation by Integrating Factor
-
Multiply both sides by :
-
Recognize the left side as the derivative of a product:
Step 3: Integrate Both Sides
-
Integrate:
-
Solve for :
-
If initial condition is given, substitute to find .
8.5 When to Use Which Method?
-
Given:
-
If : homogeneous → use separation of variables.
-
If : non-homogeneous → use integrating factors (separation won't work).
9. Second-Order Differential Equations
9.1 Standard Form
-
A second-order linear differential equation has the form:
-
For constant coefficients, this becomes:
-
If , the equation is homogeneous.
-
If , the equation is non-homogeneous.
9.2 Characteristic Equation and General Solution
-
Standard homogeneous form:
-
Associated characteristic equation:
-
Solve for roots and (via quadratic formula, factoring, etc.)
-
General solution depends on the type of roots:
Case 1: Real and Distinct Roots ()
-
Solution:
Case 2: Real and Equal Roots ()
-
Solution:
Case 3: Complex Roots ()
-
Solution:
-
Use initial conditions to solve for constants , if provided.
9.3 Spring-Mass System
No Friction
-
Forces:
-
Resulting DE:
-
Characteristic equation:
-
General solution:
With Friction
-
Additional force: damping force
-
Forces:
-
Resulting DE:
-
Characteristic equation:
-
Roots:
Types of Motion Based on Roots
Overdamped Motion ()
-
Roots are real and distinct: ,
Critically Damped Motion ()
-
Roots are real and equal:
Underdamped Motion ()
-
Roots are complex: with
10. Non-Homogeneous Second-Order Linear Differential Equations
10.1 Standard Form
-
General form of the equation:
-
If , it's homogeneous.
-
If , it's non-homogeneous.
10.2 Solution Steps
-
Find the Complementary Solution by solving the homogeneous equation:
- Solve for roots using the characteristic equation.
- Refer to:
[[Solutions of Second-Order DEs]].
-
Find a Particular Solution of the non-homogeneous equation.
-
Combine the Solutions:
10.3 The Method of Undetermined Coefficients
We focus on:
First Method
-
Assume:
-
Compute derivatives and .
-
Substitute into:
-
Match coefficients of and on both sides to find and .
Second Method (if First Fails)
Use if:
-
Assume:
-
Compute and using product rule.
-
Substitute into equation and solve for , .
Note:
- Try First Method first.
- If it fails, use the Second Method.
10.4 Forced Oscillations
- Focus: solving DEs with oscillating forcing function.
General Form
- Mass starts at rest and equilibrium.
Three Cases
-
Case 1: (Periodic Motion)
Use: -
Case 2: (Resonance)
Use: -
Case 3: (Beat)
Use same form as Case 1, but will produce beat phenomenon.
General Solution
- Use initial conditions to solve for constants , .
10.5 Beat Behavior
-
Equation:
-
If , the system exhibits beats — the amplitude varies slowly over time.
11. Sequences & Series
11.1 Introduction to Infinite Sequences and Series
Geometric Sequences
-
The general form of a geometric sequence:
- is the first term
- is the common ratio
Geometric Series
-
An infinite geometric series is written as:
-
The n-th partial sum of the series is:
- Examples:
- and so on...
- Examples:
Sum Formulas
-
Sum to terms:
-
Sum to infinity (when ):
References
11.2 The Ratio Test and Power Series
The Ratio Test
Given a series :
- If : the series converges
- If or : the series diverges
- If : the test is inconclusive
Example
Given:
Then:
Substitute into the ratio test formula.
Power Series
Power series form and convergence not elaborated here but related to the ratio test for determining convergence radius.